deeplearning.ai深度学习笔记(Course2 Week2):Optimization algorithms
1- Optimization algorithms
应用Machine learning是一项非常经验性(empirical)的过程,需要训练很多模型,然后找出效果最好的。因此,训练的速度够快是至关重要的。
本周课程介绍几种加快Gradient descent的算法: * mini-batch * momentum * RMSprop * Adam * Learning rate decay
另外,在最后说明了梯度下降的主要问题不是local optima问题,而是plateaus问题。
1-1 Mini-batch gradient descent
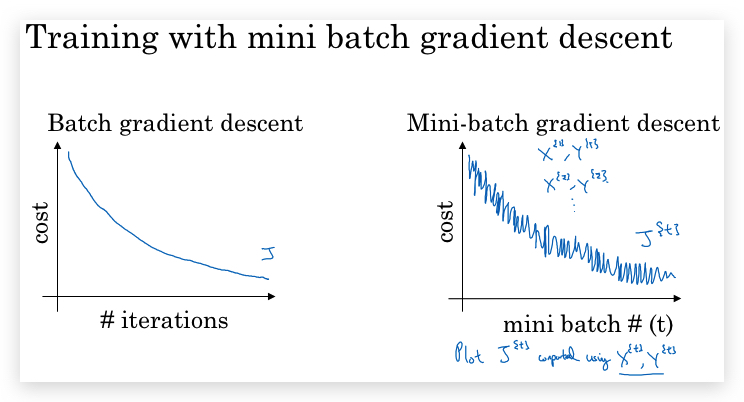
- Vectorization本身已经很大程度提升了gradient descent的速度,但之前介绍的是最基本的gradient descent算法(即batch gradient descent) 要遍历所有m个数据样本才会做一次梯度下降 。随着m的增大,这个过程会很慢,一次梯度下降的成本变得很大。
- mini-batch gradient descent即针对上述问题,每次只使用少量的样本(即min-batch大小)去做迭代,计算梯度并更新参数。由于不少全量样本,计算的梯度不一定很准,即存在抖动(后面会通过其他算法解决抖动),但速度很快 。因此,同样是遍历了m个样本,min-batch算法可以拆分成多个批次,做到更多次梯度下降,达到更快的下降速度。
- 引入标记:使用上标{i}表示拆分出的第i个批次。比如 \(X^{\{i\}}\) 表示第i个批次组成的数据集。如果一个批次的大小是1000,则每个批次的数据集\(X^{\{i\}}\) 的shape都是\((n_x, 1000)\) , Y的shape是(1, 1000)(不考虑最后一个批次零头的情况)。
- mini-batch算法很简单:
- 先确定分多个batch,假如总的数据集大小是500万,分成5000个批去做,那么每个批处理1000个数据集。循环5000个批次:
- 每个批次取出对应批次的1000条数据,在一个批次内,和传统的gradient descent没有差别,唯一就是输入的数据集不是全集,而一个批次。
- epoch:当所有批次都循环完成了,即全部m个数据集都参与过了计算,这叫一个epoch。整个算法在epoch层还会做循环,迭代很多次epoch。
- 在大数据下,基本上必然要采用min-batch gradient descent。
- 相比而言,mini-batch gradient descent的迭代过程会比较震荡。
- 不同mini-batch size(批次大小,即一个批次包含的样本数)的区别:
- gradient descent可以认为是mini-batch size是m的mini-batch gradient descent。噪声较小,但一次下降的计算速度太慢。
- 如果mini-batch size = 1,则每次只用一个样本做梯度下降,则变成 stochastic gradient descent (随机梯度下降)。噪声太大,且失去了vectorization加速。
- mini-batch和stochastic都存在噪声问题,且在local optima附近会徘徊。但设置合适大小的mini-batch size,噪声和徘徊问题可接受的范围内。
- 如何选择mini-batch size(这是一个hyperparameter):
- 小数据量,比如总的样本只有几千个,完全可以直接用batch gradient descent
- 大数量,mini-batch size倾向于选择2^n个,比如64, 128, 256等
- mini-batch 与CPU/GPU memory的内存容量。
1-2 Exponentially weighted averages
Exponentially weighted averages(指数加权平均),在统计学也称作Exponentially weighted moving averages(指数加权滑动平均)
Exponentially weighted averages概念举例:
下图蓝色点是伦敦某段时间每日温度值\(\theta_t\),而红色是加权平均后的\(v_t\), 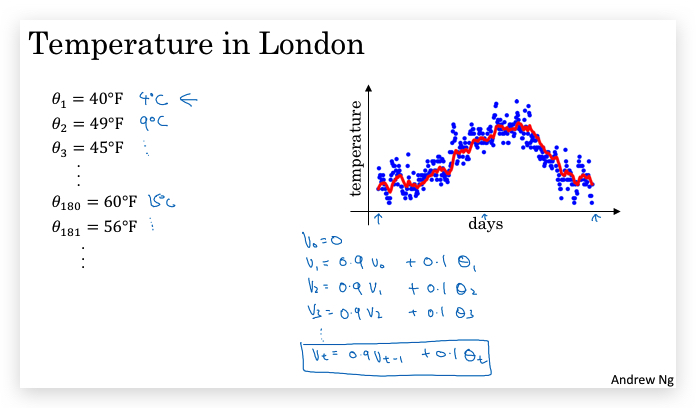 具体的加权平均方法是:每天的温度值加权值\(v_t\)设置为前一天的温度加权值\(v{t-1}\)和当天的温度实际值\(\theta_{t}\)做加权平均: \(v_t = \beta v_{t-1} + (1-\beta) \theta_{t}\)
参数β的影响是,β越大,则:
- 曲线越平滑
- 曲线会比实际值向右偏移
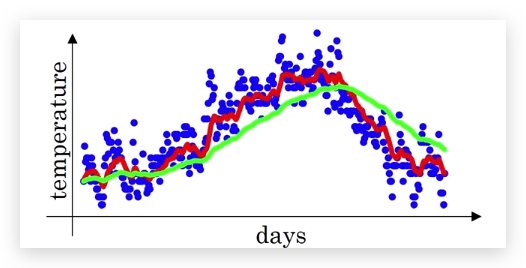
比如图中,绿色的β就比红色的β大。β越大代表历史数据的权重越大,稳定性越好,同样也更迟钝。
如何理解Exponentially weighted average
假如β=0.9,每个v的计算如下: \(v_{100} = 0.9v_{99} + 0.1 \theta_{100}\) \(v_{99} = 0.9v_{98} + 0.1 \theta_{99}\) \(v_{98} = 0.9v_{97} + 0.1 \theta_{98}\)
递归展开\(v_{100}\),得到如下: \(v_{100} = 0.1 \theta_{100} + 0.1 * 0.9 \theta_{99} + 0.1 * {(0.9)}^2 \theta_{98} + ...\)
一般的: \(v_t = \sum\limits_{i = 1}^{t} (1-\beta)\beta^{t-i}\theta_i\)
另有无穷级数求和: \(\sum\limits_{t = 1}^{n} (1-\beta)\beta^{t} = 1\)
因此可以近似的认为所有项的系数之和正好为100%。
即,\(v_t\)是对t日之前所有的实际温度的加权平均,而每个\(\theta_t\)给予的权重是\(\beta^{t-i}\),这个权重是指数递减的,越早的数据权重越小。这就是Exponentially weighted average名称的来源。
另外,有极限: \(\lim_{\varepsilon \to 0} (1-\varepsilon)^{\frac{1}{\varepsilon}} = \frac{1}{e}\)
因此当\(\varepsilon\)足够小的时候,认为: \((1-\varepsilon)^{\frac{1}{\varepsilon}} \approx \frac{1}{e}\)
当β取0.9的时候, \(\beta^{t} = 0.1^{10} = (1-0.1)^{\frac{1}{0.1}} \approx \frac{1}{e} \approx 0.35\) 即当β取0.9时,10天前的气温的权重就衰减到了只有0.35,如果将其忽略,则有
\(v_t\)近似的等于最近\(\frac{1}{1-\beta}\)天的温度加权平均值: \(v_t \approx avg(\frac{1}{1-\beta} days' temperature)\) 比如β=0.9,则近似相当于最近10天的温度加权均值。
一般的,可以认为,\(v_t\)近似的为前\(\frac{1}{(1-\beta)}\)天的加权平均值。
机器学习实践中的操作
- 并不是无限制的计算所有历史值的加权平均,而是近似的做前\(\frac{1}{(1-\beta)}\)天的加权平均值。
- 计算前\(\frac{1}{(1-\beta)}\)天的平均值,使用循环不断override的的方法,减少内存占用,只需一行代码: \(v := \beta v + (1 - \beta)\theta_t\)
Bias correction in exponentially weighted averages
由于计算\(v_1\)的时候,并没有历史值做加权,这个时候令其前一个加权值\(v_0 = 0\),则会导致\(v_1 = (1-\beta)v_0 + \beta \theta_1 = \beta \theta_1\),这个值会远小于\(\theta_1\),进而\(v_2\)也会偏小,依次类推,在靠近前面的值会出现显著的小于实际值的情况:
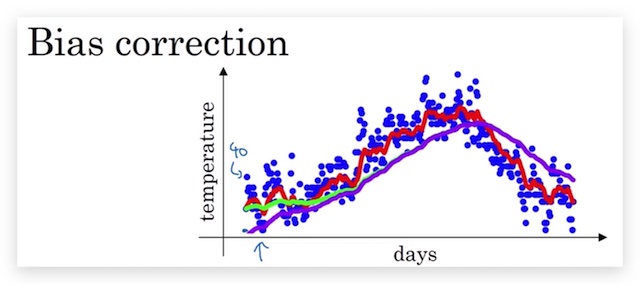
图中紫色部分的前端会明显的小于实际值。显然这是不合理的,需要修正。修正的方法是原来的计算值做如下操作: \(v_t:= \frac{v_t}{1-\beta^t}\)
合起来就是: \(v_t = \frac{\beta v_{t-1} + (1 - \beta)\theta_t}\)
在t较小的时候,\(1-\beta\ \approx 1-\beta^t\),也就是加大了\(\theta_t\)本身的权重,但当t足够大的时候,这个修正微乎其微,因此只对前面的数据有实际影响。
即便如此,在真正的Machine Learning中,也并不做这种“没必要的”修正,因为在Machine Learning中看重的是很多次迭代后的结果,初期的偏差影响并不大。
1-3 Gradient descent with momentum
In one sentence, the basic idea is to compute an exponentially weighted average of your gradients, and then use that gradient to update your weights instead.
- 问题背景:
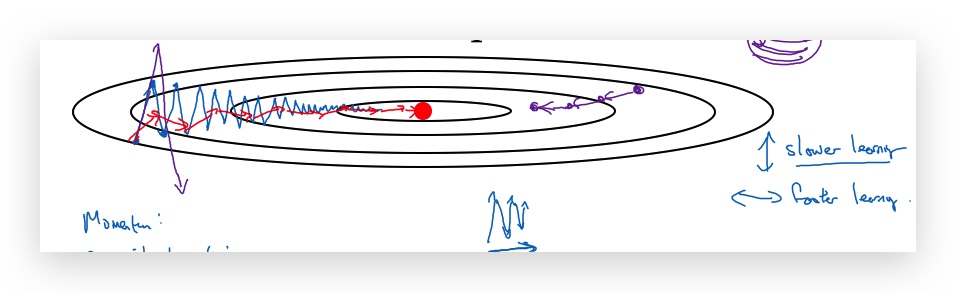
- 某个方向(属性范围较小的,如上图蓝色曲线的垂直方向)出现震荡,会让梯度下降速度会变慢(Just slowly oscillate toward the minimum. And this up and down oscillations slows down gradient descent and prevents you from using a much larger learning rate.)
- 然而,又不能通过加大learning rate解决,因为这样会在出现overshooting(如上图左边的紫色曲线)。
- 因此,在不同的参数上,希望速度不一样,比如上图垂直方向希望慢一点(避免震荡),而水平方向希望快一点(加快到optima)。基于此就有了Gradient descent with momentum。
- 应用exponentially weighted average
- 与上面伦敦气温类似,这里将每轮迭代的梯度做exponentially weighted average处理
- 每次梯度迭代(下面的式子省略标注参数所在的layer,另外\(v_{dW}\)和\(v_{dW}\)初始化为0): \(v_{dW} := \beta v_{dW} + (1 - \beta) dW\) \(v_{db} := \beta v_{db} + (1 - \beta) db\) \(w=w - \alpha v_{dW}\) \(b=b - \alpha v_{db}\) 新的算法使用\(v_{dW}\)和\(v_{dW}\)代替了原始的梯度。这样,可以让gradient更平滑
- 对于上图垂直方向,原来是会上下震荡,但引入了exponentially weighted average,相当于对前面的震荡进行了平均,结果就是上下震荡互相抵消了。而水平方向都是向右没有震荡,因此平均后还是向右。最终导致呈现上图红色的下降路线。
- Intuition for momentum 可以将上面的图想象成一个碗,梯度下降就像一个小球往碗底滚,而β的作用就相当于摩擦力。
- 引入了超参:β,实践中通常取0.9。
- 通常并不像上面计算温度的时候需要做bias correction,因为对梯度下降来说迭代次数很多,初期的不准确影响并不大,如果β为0.9,大概10次就看不到bias了。
- 另外,对于抑制mini-batch的震荡也有很好的效果: Because mini-batch gradient descent makes a parameter update after seeing just a subset of examples, the direction of the update has some variance, and so the path taken by mini-batch gradient descent will “oscillate” toward convergence. Using momentum can reduce these oscillations. 换个角度理解:在mini-batch中,引入之前迭代gradient做平均,相当于变相考虑了全部的数据集的特征。
但关于上图我有个疑问,理论上属性做过normalizing之后,应该是整个图形趋于圆形,而不是椭圆啊? 这个问题后面想通了:对于单层网络,你可以对数据集X做normalizing,但对于隐藏层,它的输入是上一层的输出,而上一层的输出并没有做normalizing。后面的课程提到了这一点,其思想就是对每一层activation function的输出都做normalizing。
1-4 RMSprop
RMSprop (Root Mean Square Propagation,均方根传递),与momentum一样,也是降低梯度的抖动。以上面的图为例,降低处置方向的下降速率,并提升水平方向的下降速率。
实际上是对梯度的平方进行exponentially weighted average,但这个结果并不承担梯度的作用(Gradient descent with momentum却是这样,计算的\(v_{dW}\)代替了\(dW\)去更新参数。),而是平抑不同大小梯度的更新速率。实际上 作用在α上的。
- 算法: \(s_{dw} = \beta s_{dw} + (1 - \beta)(dw)^2\) \(s_{db} = \beta s_{db} + (1 - \beta)(db)^2\) \(w := w - \alpha \frac{dw}{\sqrt{s_{dw} + \varepsilon}}\) \(b := b - \alpha \frac{db}{\sqrt{s_{db} + \varepsilon}}\)
其中上式中分母中增加\(\varepsilon\)通常取一个很小的值,仅仅是为避免出现分母太小趋近于0导致计算失败的问题。
- Intuition 垂直方向,比较陡,梯度比较大,但我们又希望它下降的慢。因此对梯度除以一个较大的值,所以用梯度的平方的平均来表示。让不同的参数拥有不同的learning rate。
从某种角度看,RMSprop会根据当前的梯度自动调整参数的learning rate,梯度大降低learning rate,梯度小的时候提高learning rate,从而一方面避免了震荡,另一方面避免在平坦的地方徘徊太久。
1-5 Adam optimization algorithm
简单的说,Adam(Adaptive Moment Estimation,自适应矩估计)就是momentum和RMSprop的结合。momentum负责平滑梯度,而RMSprop负责调解learning rate。
算法如下(以下都省略了layer):
- 引入的变量有:
- \(v\) : 计算同momentum算法,将梯度进行指数加权平均
- \(s\) : 计算同RMSprop,将梯度的平方进行指数加权平均
- \(\beta_1\) : 计算\(v\)的加权参数
- \(\beta_2\) : 计算\(s\)的加权参数
-
在迭代前,初始化参数v和s \(v_{dW} = 0, s_{dW} = 0, v_{db} = 0, s_{db} = 0\)
-
对第t次梯度下降的迭代 a. 首先计算dw和db的v和s \(v_{dW} = \beta_1 v_{dW} + (1 - \beta_1) dW\) \(s_{dW} = \beta_2 s_{dW} + (1 - \beta_2) (dW)^2\) \(v_{db} = \beta_1 v_{db} + (1 - \beta_1) db\) \(s_{db} = \beta_2 s_{db} + (1 - \beta_2) (db)^2\)
b. 然后做修正
\(v^{corrected}\_{dW} = \frac{v_{dW}}{1 - (\beta_1)^t}\) \(s^{corrected}\_{dW} = \frac{s_{dW}}{1 - (\beta_2)^t}\) \(v^{corrected}\_{db} = \frac{v_{db}}{1 - (\beta_1)^t}\) \(s^{corrected}\_{db} = \frac{s_{db}}{1 - (\beta_2)^t}\)
c. 最后更新参数W和b
\[W = W - \alpha \frac{v^{corrected}\_{dW}}{\sqrt{s^{corrected}\_{dW}} + \varepsilon}\] \[b = b - \alpha \frac{v^{corrected}\_{db}}{\sqrt{s^{corrected}\_{db}} + \varepsilon}\]
超参的选择: - \(\alpha\):需要调优 - \(\beta_1\): 通常选择为0.9 - \(\beta_2\): 通常选择为0.999 - \(\varepsilon\): 一般不需要调优,选择一个小数,比如\(10^{-8}\)
1-6 Learning rate decay
为什么要做learning rate decay?
较大的learning rate虽然在算法开始阶段会加快收敛速度,但在收敛接近到优化点的时候,算法会在优化点附近震荡,如下图:
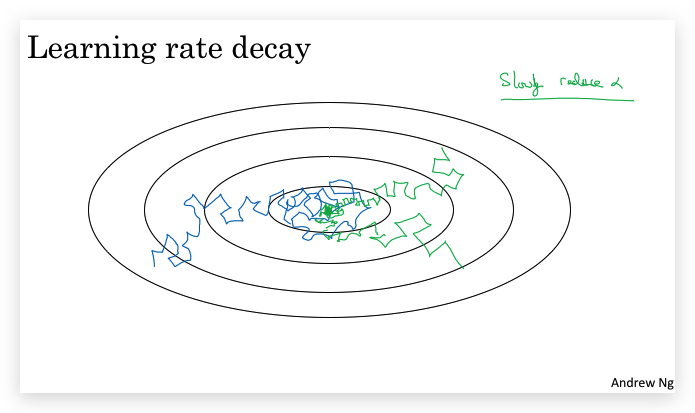
如何做learning rate decay? 思路很简单,就是引入一个函数,让α随着迭代(比如min-batch的epoch)递减。为此可以采用的decay函数有:
-
倒数: \(\alpha := \frac{1}{1 + decay\\_rate * epoch\\_num} \alpha\)
-
指数函数: \(\alpha := 0.95^{epoch\\_num} * \alpha\)
-
根号倒数 \(\alpha := \frac{k}{\sqrt{epoch\_num}} * \alpha\)
甚至手工调节。
看到这里,我不禁想起来Andrew Ng在Machine Learning中提到的,learning rate不需要根据迭代去调整,因为越靠近optima,梯度本身就变小了,所有learning rate无需调节小。但引用到deep learning中的mini-batch情况,显然就不适合了。
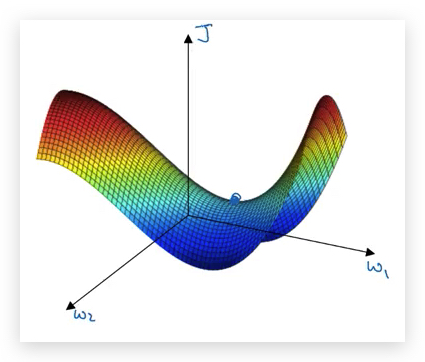
1-10 The problem of local optima
直觉上,人们认为梯度下降的主要问题是收敛到local optima,如下图:
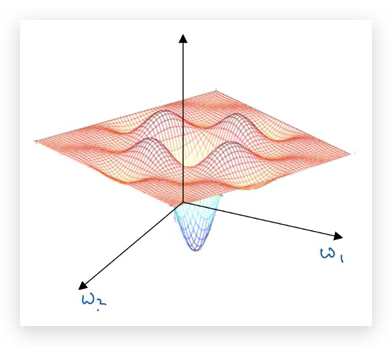
长期以来,这也是人们“直觉的误解”,但在高维空间里,其实local optima并不常见。原因就是在高维空间,所有维度同时得到同方向倒数(都是凹函数)为0的概率极低。更常见的情况是收敛到了鞍点(saddle),即某些维度取的是最小值,某些取的是最小值。
所有,担心收敛到local optima,真是人们想多了,实际上并没有想象的那么多local optima。在高维空间,几乎不太可能被困在一个local optima,这是一个好消息。
令人意外的是,这样一个误解,竟然在最近不久才被人们认识到。这部分可以参考我找的资料:https://www.zhihu.com/question/68109802
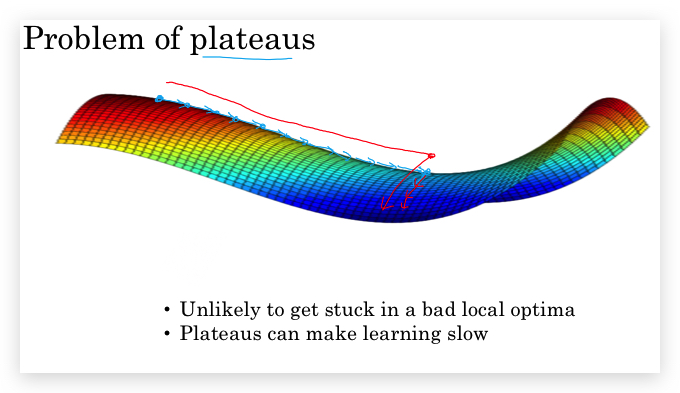
但梯度下降的真正挑战是高原问题(Problem of plateaus),即在广阔的高原上,梯度下降算法下降太慢。而Adam算法正好可以解决这个问题,在该加速的时候加速。
-------------------------
本文采用 知识共享署名 4.0 国际许可协议(CC-BY 4.0)进行许可。转载请注明来源:https://imshuai.com/deeplearning-ai-notes-course2-week2 欢迎指正或在下方评论。